Moderne sensoren verschillen sterk in principes en structuren. Hoe een sensor op een verantwoorde manier te kiezen op basis van specifieke meetdoelen, objecten en omgevingen, is het eerste probleem dat moet worden opgelost bij het meten van een grootheid. Zodra de sensor is bepaald, kunnen ook de ondersteunende meetmethoden en apparatuur worden vastgesteld. Het slagen van meetresultaten hangt grotendeels af van of de sensor op een verantwoorde manier is gekozen.
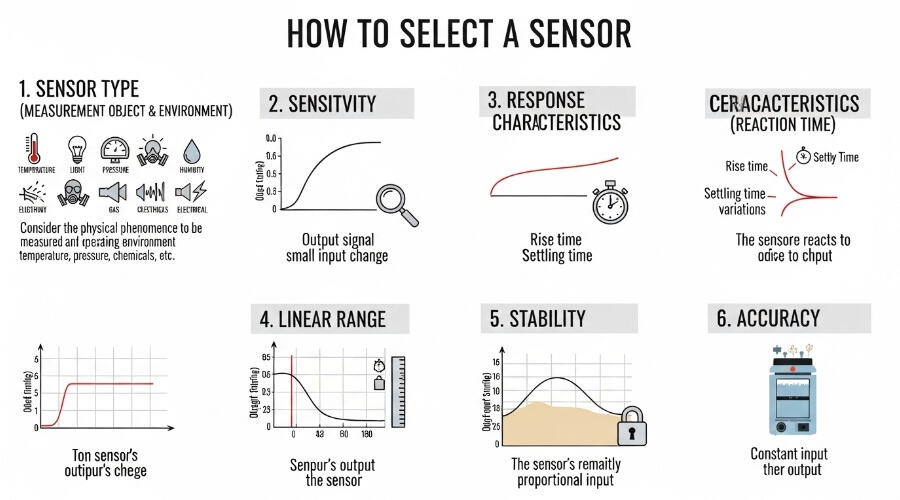
Ten eerste, d etermineren ing de Sensor Type op basis van het Meetobject en de Omgeving
Om een specifieke meting uit te voeren, is de eerste stap om na te denken over welk sensorprincipe moet worden gebruikt, wat een analyse vereist van meerdere factoren. Zelfs voor het meten van dezelfde fysieke grootheid zijn er meerdere sensorprincipes beschikbaar. De geschiktheid van een sensorprincipe hangt af van de kenmerken van de te meten grootheid en de bedrijfsomstandigheden van de sensor, waarbij de volgende specifieke aspecten moeten worden overwogen: m meetbereik bent, eisen aan de sensorafmetingen op basis van de gemeten positie , C contact- of non-contact meetmethode , s signaaluitvoermethode (bedraad of contactloos) , s sensorherkomst (binnenlands of ingevoerd), kostenbetaalbaarheid, of zelfontwikkeld . Na overweging van bovenstaande punten kan het sensortype worden bepaald, gevolgd door specifieke prestatie-indicatoren.
Tweede, Selectie van Gevoeligheid . Over het algemeen, binnen de lineaire bereik van een sensor, wordt een hogere gevoeligheid voorgekozen. Een hogere gevoeligheid resulteert in grotere uitkomstsignalen die corresponderen met veranderingen in de gemeten hoeveelheid, wat het signaalverwerken vergemakkelijkt. Het moet echter worden opgemerkt dat een hoge gevoeligheid gemakkelijk externe ruis kan invoeren die niet gerelateerd is aan de gemeten hoeveelheid, wat door het systeem kan worden versterkt en de nauwkeurigheid van de meting kan beïnvloeden. Daarom moet de sensor zelf een hoog signaal-ruisverhouding hebben om storing van externe bronnen te minimaliseren.
De gevoeligheid van een sensor is richtingsgevoelig. Voor metingen in één richting met hoge richtingsvereisten, kies dan sensors met een lage gevoeligheid in andere richtingen; voor meervoudige dimensiemetingen, kies sensors met minimaal kruisgevoeligheid.
T derde, r responskenmerken (reactietijd) . De frequentieresponskarakteristiek van een sensor bepaalt het meetbare frequentiebereik van de gemeten grootheid, waarbij de meting binnen het toegestane frequentiebereik vormvervorming-vrij moet blijven. In de praktijk heeft de respons van een sensor altijd een zekere vertraging, waarbij kortere vertragingstijden worden geprefereerd. Een hogere frequentierespons stelt bredere meetbare signaalfrequentiebereiken mogelijk, terwijl mechanische systemen met grote traagheid (vanwege structurele beperkingen) geschikt zijn voor sensoren met lagere eigenfrequenties en smaller meetbare frequentiebereiken. Bij dynamische metingen dient de responskarakteristiek afgestemd te worden op het signaaltype (stationair, transient, willekeurig, enz.) om te grote fouten te voorkomen.
Vierde, Lineaire bereik . De lineaire bereik van een sensor verwijst naar het bereik waarbinnen de uitkomst evenredig is met de invoer. Theoretisch blijft de gevoeligheid binnen dit bereik constant. Een breder lineair bereik stelt een groter meetbereik in staat en garandeert meetnauwkeurigheid. Bij het kiezen van een sensor moet eerst worden gecontroleerd of het bereik aan de eisen voldoet nadat het type sensor is bepaald.
In de praktijk is geen enkele sensor volledig lineair, en lineariteit is relatief. Voor meetvereisten met lage precisie kunnen sensoren met kleine niet-lineaire fouten binnen een bepaald bereik worden benaderd als lineair, wat de metingen aanzienlijk vereenvoudigt.
F vijfde, Stabiliteit . Stabiliteit verwijst naar de mogelijkheid van een sensor om na een periode van gebruik zijn prestaties onveranderd te houden. Factoren die invloed hebben op de langtermijnstabiliteit omvatten niet alleen de structuur van de sensor, maar ook zijn werkingsomgeving. Daarom moeten sensoren om goede stabiliteit te waarborgen sterke milieuadaptatievermogens hebben.
Onderzoek voordat u een sensor selecteert de beoogde gebruiksomgeving en kies een geschikte sensor of neem maatregelen om de invloed van de omgeving te verminderen. Stabiliteit heeft kwantitatieve indicatoren; nadat de levensduur is overschreden, kalibreer de sensor opnieuw voordat u deze gebruikt om te controleren of de prestaties zijn veranderd. In toepassingen waarbij langdurig gebruik zonder eenvoudige vervanging of herkalibratie vereist is, zijn de eisen voor stabiliteit strenger, waardoor de sensor langdurige tests moet kunnen doorstaan. -kalmibreer de sensor voor gebruik om te bevestigen of de prestaties zijn veranderd. In toepassingen die langdurig gebruik zonder gemakkelijke vervanging of opnieuw -kalmibratie vereisen, zijn de stabiliteitseisen voor sensoren strenger, met behoefte aan weerstand tegen langdurige testen.
S zesde, Precies . Nauwkeurigheid is een cruciale prestatie-indicator van sensoren en een belangrijke factor voor de meetnauwkeurigheid van het gehele systeem. Sensoren met hogere nauwkeurigheid zijn duurder, dus de nauwkeurigheid van de sensor hoeft alleen aan de systeemeisen te voldoen—er is geen overdreven hoge precisie nodig. Dit maakt het mogelijk om onder de sensoren die dezelfde meetdoelstellingen vervullen, goedkopere en eenvoudigere modellen te kiezen. Voor kwalitatieve analyse kiest u sensoren met hoge herhaalbaarheid in plaats van hoge absolute nauwkeurigheid. Voor kwantitatieve analyse die nauwkeurige metingen vereist, selecteer sensoren met geschikte nauwkeurigheidsklassen.
In speciale toepassingen waarin geen geschikte sensor beschikbaar is, kan zelfontwerp en productie noodzakelijk zijn, met zelfgemaakte sensoren die de prestatie-eisen moeten voldoen.
 Actueel nieuws
Actueel nieuws2026-03-04
2026-02-12
2025-11-21
2025-11-13
2025-11-13
2025-10-29